- 総合TOP
- 宇宙
- AI
- ロボット
- WEB3・メタバース
ロボット一体を動かすには、数千行のコードと複雑な座標が求められる――。そんなエンジニアたちの「苦労」がいま、フィジカルAIの台頭によって過去のものになろうとしている。人間が手本を見せれば、AIがその動きを学習し、自律的にタスクをこなす。この「模倣学習」の波が、オープンソースという強力なエンジンを得て、日本の製造・物流現場へと押し寄せている。
株式会社EmplifAIが進めるプロジェクトは、このパラダイムシフトを象徴するものだ。彼らが活用しているのは、世界中のAI開発者が熱視線を送る共通基盤「LeRobot」。ハードウェアの垣根を越え、AIが「身体」を自由自在に操る未来。その社会実装に向けた最前線を追う。(文=AI Base編集部)
「LeRobot」が繋ぐAIと身体。ロボットの“自律動作”への挑戦
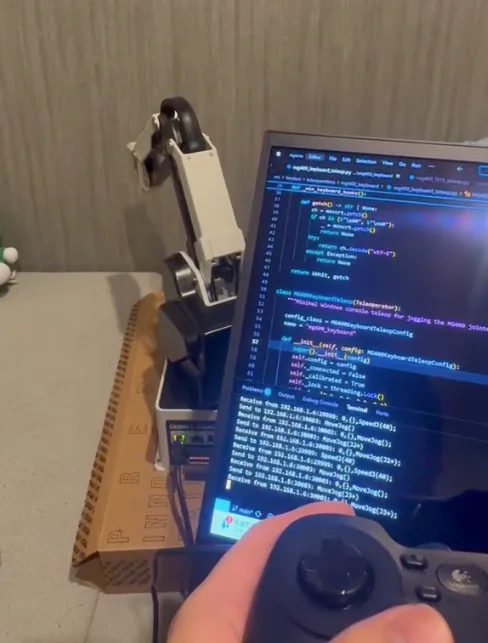
2025年11月、株式会社EmplifAIはDOBOT社製の協働ロボットアーム「MG400」を対象に、オープンソースロボティクス基盤「LeRobot」を活用した制御・学習スタックの開発を開始した。その後、プロジェクトは実機デモや展示会での公開も検討されている。
(引用元:PR TIMES )
このプロジェクトの核心は、メーカーごとに分断されていたロボットのソフトウェアスタックの課題を、オープンソースのロボティクス基盤である「LeRobot」を介して解決しようとする点にある。
具体的な開発内容である「MG400 LeRobotスタック」には、フィジカルAIの実装に必要な一連のパイプラインが含まれている。まずは、オペレーターが直感的にロボットを動かし、その軌跡や関節角度、カメラ画像を自動で記録する「データ収集」。次に、そのデータをAIが解析し、物体をつかむ、並べる、組み立てるといったタスクの「政策(ポリシー)学習」を行う。そして最後に、学習済みモデルを再びロボット実機に流し込み、自律動作を実現する「デプロイ」だ。
特筆すべきは、このプロセスに「プログラミング」という従来の工程が介在しない点である。人間が行った手本をAIが学び、自ら行動を生成する。この「模倣学習」の確立により、専門のロボットエンジニアが不在の現場であっても、作業員がAIに手本を見せることで、複雑な業務を自動化できるのだ。
「フィジカルAI」の民主化へ――2026年以降の産業構造
この取り組みがもたらす最大の価値は、ロボット開発の「民主化」と「標準化」の加速である。
これまでのロボット産業は、各メーカーが独自のソフトウェアスタックを抱え込む「囲い込み」の構造が強かった。そのため、AI技術を導入しようとしても、メーカーごとに個別の調整が必要になり、多大なコストと時間がかかっていた。
しかし、LeRobotのようなオープンソース基盤が普及すれば、OSとしてのWindowsやLinuxのように、ハードウェアの差異をソフトウェアが吸収してくれる。これにより、異なるメーカーのロボットアームであっても、同じワークフローでAI教育を施せる「マルチベンダー対応」が現実のものとなる。
この変化は、特に日本の中小企業やスタートアップにとって大きな追い風となるだろう。高額な開発コストをかけずとも、共通基盤を活用することで、特定の工程に特化した「賢いロボット」を安価に導入できるようになるからだ。
また、AIによる模倣学習は、単なる効率化を超えて、日本の製造業が直面する「技能継承」という難題への処方箋にもなり得る。ベテラン職人が持つ「絶妙な力加減」や「素材のわずかな変化に対する反射」といった言葉では説明できない暗黙知を、AIはデータとして吸い上げ、デジタル資産として保存できる。AIというフィルターを通すことで、匠の技が「枯れることのない知能」として現場に残り続けるのだ。
2026年、AIは画面の中の「情報処理」という役割を終え、現実世界の「物理作業」へと本格的に進出した。EmplifAIの試みは、ソフトウェアの進化がハードウェアの制約を解き放ち、ロボットが「プログラム通りに動く機械」から、「現場と共に育つパートナー」へと昇華するための重要な社会実装のモデルケースとなる。
プログラミングから「教育」へ。現場の熱量とAIが直結することで、ロボットは単なる設備であることをやめ、日本のものづくりの底力を引き出す不可欠なインフラへと進化を遂げるはずだ。


- share
-

-

-